Ardublockly – Arduino Programming Interface online
Interfaz de programación para Arduino Online
0
Read More

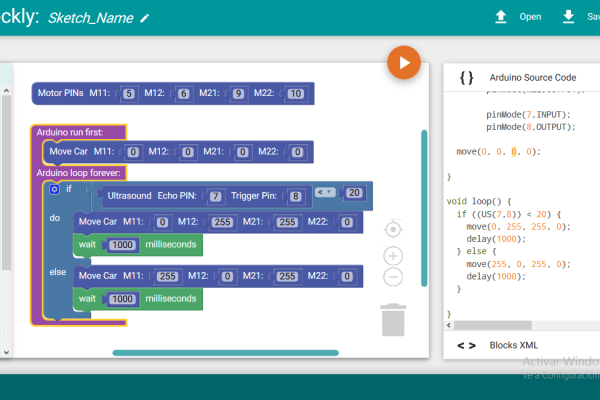
Interfaz de programación para Arduino Online
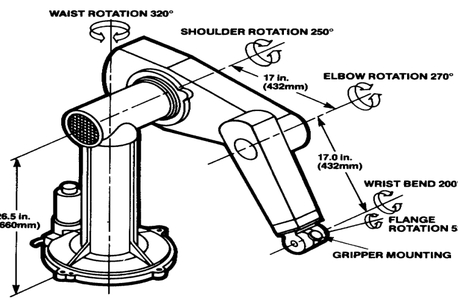
Como ya hemos explicado en un post anterior “Cómo crear tu propio brazo robótico“, y ahora hablaremos de cómo se diseñan estas referencias de Denavit-Hartenberg con una serie de instrucciones paso por paso. Para verlo expondremos un ejemplo aplicado y al final lo podremos ver representado en una escena en donde podremos visualizar sus movimientos. Los pasos a seguir son: Elección de referencias para cada articulación. Obtención de los parámetros de Denavit-Hartenberg. Crear una tabla e introducción de datos en…
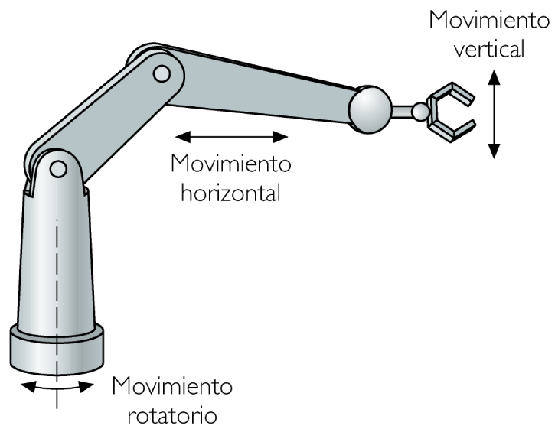
Para crear un brazo robótico hay que definir unos parámetros que se inventó un señor muy inteligente llamado Denavit-Hartenberg. Estos parámetros no son un simple invento sino que tienen su razón de ser y que explican muy bien en Wikipedia y son los más utilizados en robótica para diseñar eslabones en serie unidos por articulaciones. Explicaremos detalladamente en qué consiste la definición de estos parámetros, cómo funcionan y desarrollan los movimientos que requerimos en el siguiente post “Referencias Denavit-Hartenberg“. Para…