Desarrollamos en este apartado todos los pasos para crear el Smart Car Chassis de 4 ruedas y así montar sin error cada una de las partes de nuestro modelo robótico que después nos dispondremos a controlar con la placa de Adafruit MotorShield.
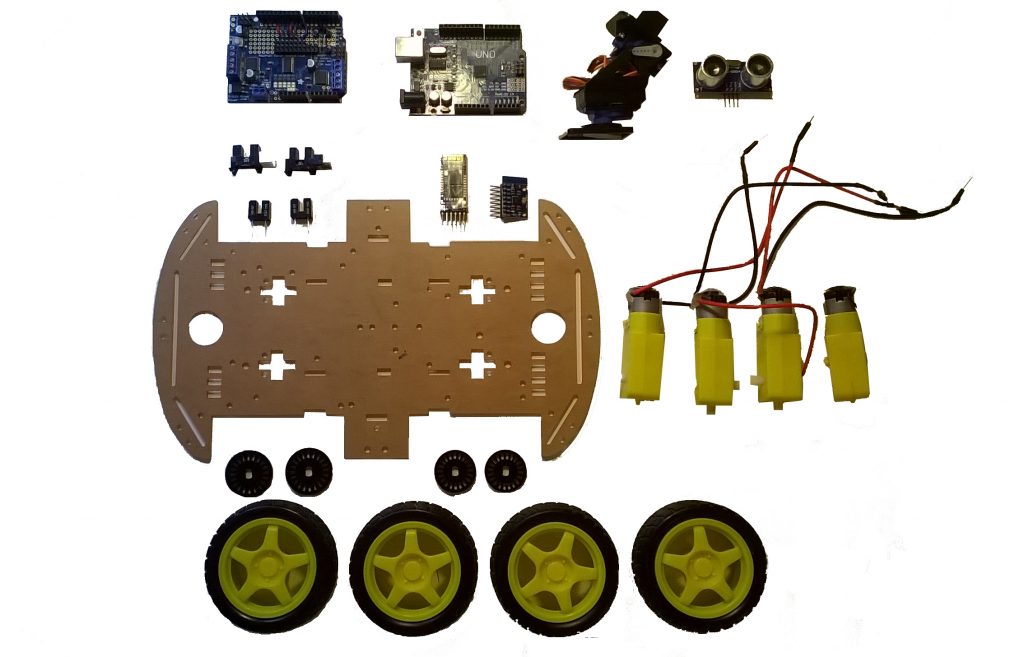
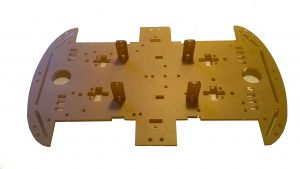
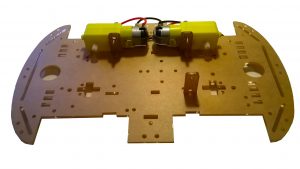
Chasis y Motores
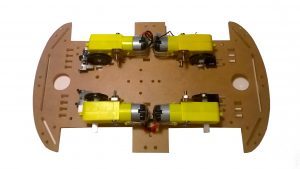
Primero debemos preparar los motores en la parte de abajo con las pestañas que nos dan en el kit
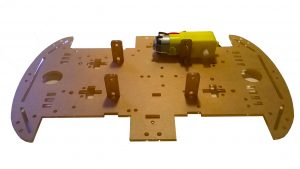
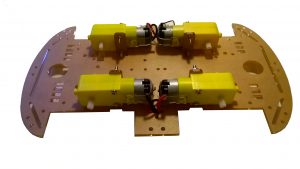
Por último se añaden los encoders ópticos que hemos visto anteriormente cómo se programan en una lección anterior.
Preparación del IMU




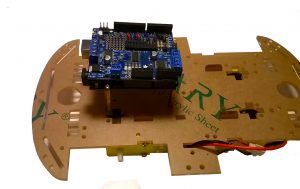
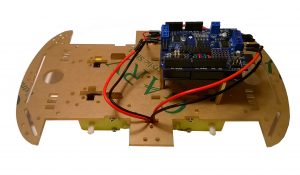
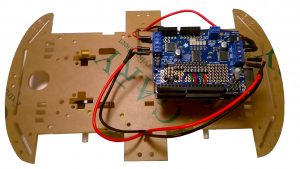
Placa Arduino y Shield de Adafruit – El cerebro y el músculo de nuestro robot


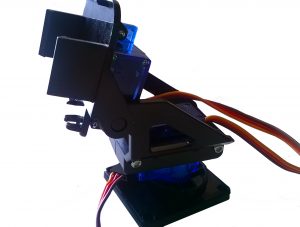
Preparación del Servo con Ultrasonido
Las piezas que vienen para este montaje son unas piezas denominadas servo-bracket preparado para manejarse con dos servomotores. Lo raro es que solo incluyen uno en el kit con unos tornillos del demonio que no entran ni para atraás y los anclajes del servo con la base no están nada adaptados. Y tampoco está pensado para introducir el sensor ultrasonido. Así que será necesario recortar estos anclajes o alguna de las piezas para hacer que funcionen bien.

En la primera opción hay que realizar algunos cortes con cutter.
Se trata de romper la pieza cuadrada haciendo más grande el agujero para meter el anclaje por debajo de la pieza y además de eso, hay que rebajar la zona circular para que no haga tope con el servomotor.


El segundo trata de cortar el anclaje para poder alojarlo en el interior y una vez que se pueda introducir; solamente hay que introducir un tornillo por uno de sus agujeros, aunque me gusta más la anterior.

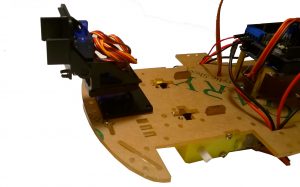
Una vez realizada esa primera parte, solo tendremos que disponer del resto de piezas y unirlas como aparecen en las imágenes. La pieza no está diseñada para fijar el sensor ultrasonido; así que lo pegaremos a un trozo de papel y celo para que podamos pegarlo a los laterales de la pieza móvil.




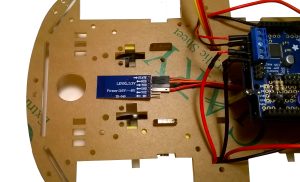
Conexión del Bluetooth