
Para crear un robot, la electrónica es un aspecto esencial para poder operar con él. Pero antes me gustaría aclarar una valoración a la hora de ponerse a desarrollar.
Durante el desarrollo, comenzaremos con un prototipo de pruebas, por lo que no nos preocuparemos mucho por el aspecto final, sino en su funcionalidad.
En muchas ocasiones podremos ver proyectos en internet que tienen un manojo de cables, placas de prototipado, soldaduras con exceso de estaño y en algunos casos tropezones de silicona o celo para mantener unidas las piezas.
Una vez se soltó un cable y ya no me acordé de dónde había que ponerlo para no causar un cortocircuito.
Este modelo llego a funcionar un año entero, antes de que uno de los drivers se quemara sin saber muy bien cómo.
Con todo esto, quiero decir que la mejor manera de desarrollar robots no es la capacidad de unir cables. El conocimiento es importante, pero tan importante es un desarrollo ordenado y compacto tanto en el robot como en nuestra cabeza.
Así que si seguimos unas pautas prácticas de electrónica antes, podremos invertir más tiempo en desarrollar nuestros robots, más que buscar dónde esta el fallo de un cable pelado. Y creedme, eso son horas perdidas de vida…
Diagramas de conexiones.
Además de ser limpios a la hora de montar nuestros prototipos, también es interesante poder desarrollar nuestros propios esquemas para que otras personas los entiendan.
Durante el desarrollo de las diferentes lecciones iré colgando esquemas que faciliten la comprensión de las conexiones de los cables.
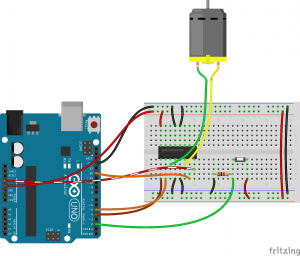
Esquema de Fritzing conectado con espagueti
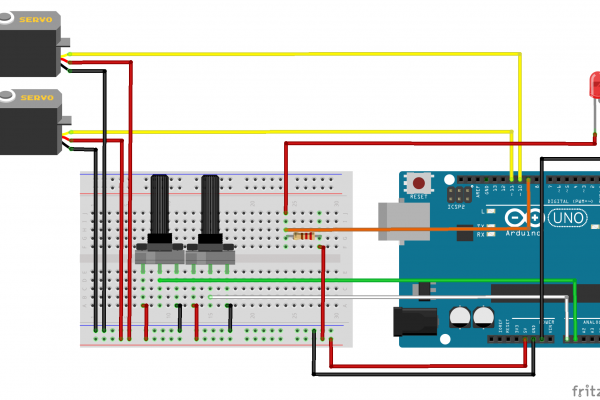
Esquema de Fritzing personalizado
Evidentemente en la realidad no quedarán los cables formando esquinas de 90º, pero nuestro objetivo es saber, desde que pin a que conexión se han de conectar los distintos elementos.
Conectando cables – Voltaje
Los cables no son nada más que la transmisión de un voltaje definido hacia un elemento de nuestro circuito.
Muchas veces nos encontraremos con los problemas de clase típicos en el que tenemos que calcular el valor de voltaje entre dos extremos de un componente.
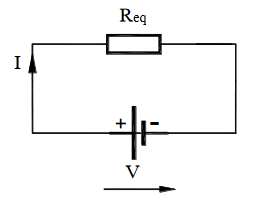
En este circuito básico, solo tenemos que aplicar la ley de ohm para conocer el estado de todas las variables y darles un valor y en este caso el circuito funcionará igual e invariante.
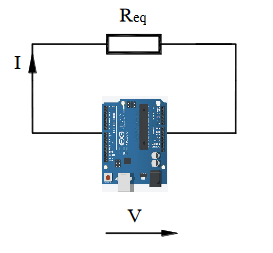
Pero en la realidad de la robótica, el voltaje que circulan por los cables puede variar.
Nuestro cometido es saber programar y controlar el nivel de voltaje que circulan por estos dos extremos y éste sí que podemos hacerlo variar con el tiempo.
Con este voltaje podemos transmitir potencia para que la electrónica tenga alimentación para que funcione; pero también podemos transmitir información.
Y esto es muy importante…
La potencia es la encargada de proporcionar energía y se representa comunmente con el cable negro y rojo. Pero el que manda información no tiene la misión de aplicar energía, sino de controlar cuál debe de ser el comportamiento de nuestro circuito. El color del cable de la señal suele ser de color amarillo.
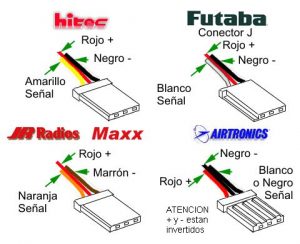
Servo Cables
A través del cable de información podemos dar ordenes para mover un servomotor a una posición determinada, mandar mensajes, leer el estado de los sensores…
Pero a fin de cuentas, sigue siendo un voltaje eléctrico. Al igual que circula internet por un cable hasta nuestro router, también es un cable que nos proporciona información sobre el estado de nuestro sistema.
A veces podemos pasarnos a la hora de proporcionar energía a nuestra placa y quemarla. Es por ello, que es necesario aislar nuestra placa de nuestros circuitos con una etapa de potencia.
El voltaje es una diferencia de potencial entre un cable y otro.
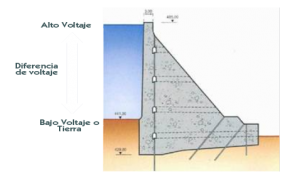 Cuanto más diferencia de voltaje tengamos, más capaces seremos de poner a funcionar elementos más potentes. Como una presa de agua, cuanto mayor sea la altura, mayor será la presión que tendremos si conectamos una tubería a ella.
Cuanto más diferencia de voltaje tengamos, más capaces seremos de poner a funcionar elementos más potentes. Como una presa de agua, cuanto mayor sea la altura, mayor será la presión que tendremos si conectamos una tubería a ella.
Pero cuidado que la corriente puede ser muy fuerte y romper lo que haya a su paso, así que es recomendable estar protegidos para evitar causar algún cortocircuito.
Tampoco hay que preocuparse mucho, ya que la electrónica de nuestra placa funciona a 5V, aunque eso no quiere decir que no se pueda romper.
El concepto más importante es el de tierra, ya que si los elementos que utilizamos no están en la misma referencia de voltaje 0 pueden no funcionar correctamente.
Este caso lo veremos a la hora de controlar motores desde una fuente de energía externa.
La corriente es la velocidad de la electricidad dentro de un cable.
 Como en una tubería del agua, la corriente es la velocidad que tiene la electricidad. Realmente este fenómeno es el que hace que la electricidad suponga un peligro. Si nos sumergimos en un rio con mucha corriente, es posible que aparezcamos muy lejos.
Como en una tubería del agua, la corriente es la velocidad que tiene la electricidad. Realmente este fenómeno es el que hace que la electricidad suponga un peligro. Si nos sumergimos en un rio con mucha corriente, es posible que aparezcamos muy lejos.
La resistencia es la suciedad dentro de la tubería.
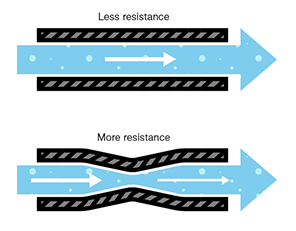 Si dentro de una tubería se acumula mucha suciedad en las paredes, lo que hará es frenar su avance y a su vez perdiendo parte de la energía que proporciona nuestra fuente.
Si dentro de una tubería se acumula mucha suciedad en las paredes, lo que hará es frenar su avance y a su vez perdiendo parte de la energía que proporciona nuestra fuente.
Una resistencia, actua como un elemento disipativo, pero también se puede utilizar para proteger y controlar otros elementos de nuestro circuito.
Existen muchas maneras de crear nuestros circuitos si sabemos interpretar las conexiones entre los cables.
Si estamos empezando y solo queremos aprender las bases de la electrónica, una placa de prototipado, cables y otros elementos son suficientes.
Pero si queremos hacer robots de verdad, deberemos dejar estas placas de lado y buscar un shield más específico que nos eviten problemas asociados a golpes, rotura y cables mal unidos.
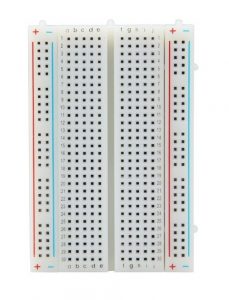
Placa de prototipado. Solo para pruebas de funcionamiento.
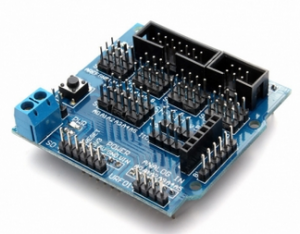
Shield para sensores. Perfecta para robotear.
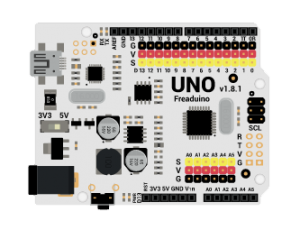
Finalmente, tenemos la opción de comprar una placa clónica de Arduino extendida para cablear desde la misma. Todos los pines de color rojo son de alto voltaje ( 5V ) y los negros de tierra ( 0V ). De esta manera, podemos acceder a esas conexiones sin una placa de prototipado adicional.
Una vez que hayamos realizado todas las conexiones de nuestro robot y no vayamos a hacer ningún cambio adicional en la electrónica es recomendable utilizar bridas para mantener todos los cables compactos para que ocupen poco espacio.
