Enviar datos Arduino por Bluetooth a App Inventor
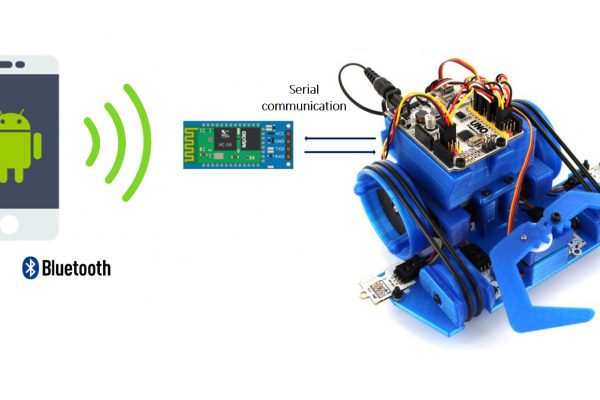
En muchos tutoriales anteriores hemos explicado el formato para enviar datos de nuestra aplicación con App Inventor a nuestros robots con Arduino. Pero ahora nos toca hacer lo contrario. Enviar datos de nuestro robot a nuestra aplicación móvil. Este caso es muy útil cuando tenemos un robot con el que no hay contacto visual, por ejemplo detectando obstáculos con un sensor ultrasonido y esa información nos sería útil para saber si debemos elegir un camino u otro para avanzar por…
3
Read More