
Robot Beetle Remote Calibration
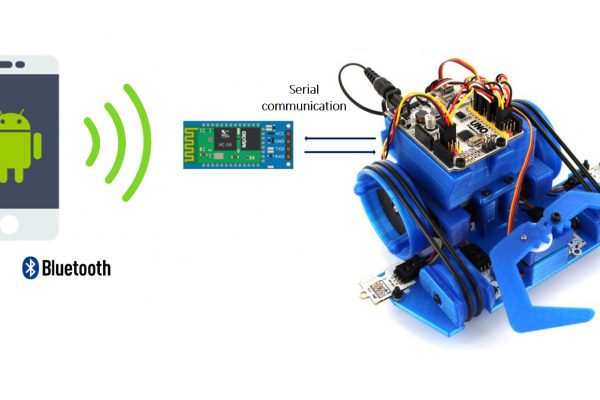
En el tutorial anterior, completamos el código de nuestro robot Beetle para crear una comunicación Bluetooth con varias aplicaciones. Para ello utilizabamos una aplicación llamada Arduparser que nos daba la posibilidad de leer cadenas de texto que contienen información que es procesada en trozos divididos por delimitadores. Con respecto al programa anterior vamos a realizar algunas modificaciones. Calibración del nivel de luz para ordenar la ejecución de movimiento Calibración de la diferencia de luz medida entre los dos sensores Modificación…
1
Read More